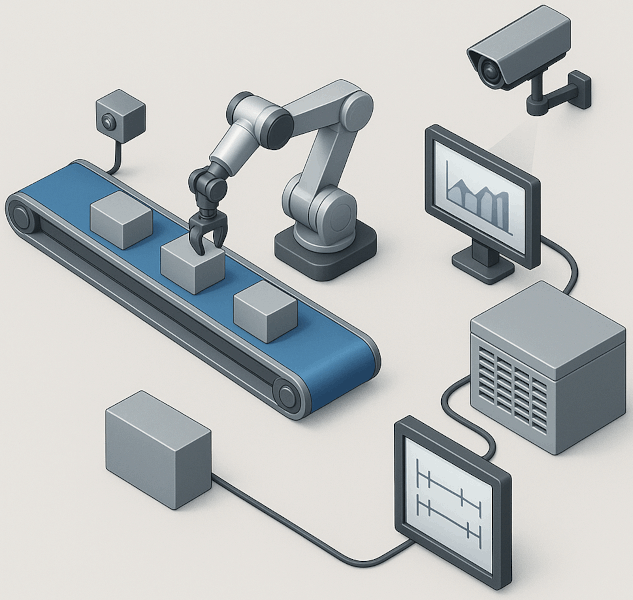
ロボットアームと PLC のみで構成。小規模から始める自動化。
まずは、ケースから。
操作画面を備え、誰でも使いやすい インターフェース に。
エンコーダーと コンベヤ で製品位置をトラッキング。
画像処理 で良否判定、不良品を自動排出。
各工程の カメラやセンサー で稼働状況を可視化。
カメラ画像から位置と向きを判定し 自動ピック 。
稼働ログを クラウド で可視化・分析。
製造データを リアルタイム に取得・管理システムと連携。
2台のロボットが 連携 し工程を自動化。
搬送〜加工〜検査〜排出まで 完全自動 。
複数のユニットを統合制御し 全体最適 。
※本ページは、説明を目的に要点を整理しています。詳細は現場条件に合わせて設計します。
構成要素。
要素の役割が分かると、構成の取捨選択が速くなります。
ロボットアーム
PLC
ラダープログラム
ロボット用プログラム
センサー
タッチパネル
コンベヤ
エンコーダー
監視カメラ
DX
ビジョンセンサー
設備は、こう動く。
センサー → PLC → ロボット → 次工程。基本の流れを押さえると、構成の要点が見えてきます。
① 検知・計測
センサー/ビジョンが位置・向き・状態を取得します。
② 判断・順序制御
PLC(ラダー)が条件分岐・インターロック・タイミングを統括します。
③ ロボット動作
ロボットプログラムが動作を実行(ピッキング・搬送・組立など)。
④ 記録・可視化
稼働ログや品質結果を記録し、改善へつなげます(DX/IoT)。
エンコーダー
エンコーダー は、ロボットの“感覚器官”です。位置・角度を数値で捉え、正確な動作を支えます。
位置測定
ロボットの移動距離やアーム角度を高精度で記録
動作制御
モーターと連携して、ピタッと止まる繊細な制御
安全確保
異常を検知して、緊急停止や動作補正を実行
ビジョンセンサー
エンコーダー は、ロボットの“感覚器官”です。位置・角度を数値で捉え、正確な動作を支えます。
位置測定
ロボットの移動距離やアーム角度を高精度で記録
動作制御
モーターと連携して、ピタッと止まる繊細な制御
安全確保
異常を検知して、緊急停止や動作補正を実行
具体的な活用例
実際の現場で効きやすい代表例。
ピッキング・組立
動的な位置認識と自動組立
外観検査
不良品を画像判定・排除
データ監視
稼働ログを記録・分析
追従作業
移動体にあわせた追尾制御